Hi-Rel Intermediate bus converter and point of load
- Posted by Manuel Padial Pérez
- On December 11, 2021
- 0
The evolution of power distribution in the spacecraft goes into a modular architecture direction. Especially the secondary power distribution from the satellite bus to the modules can be made more efficient by applying modular design and standard power interfaces.
This requires new approaches in the design of the secondary power conditioning unit (power buses and local power conversion), so that it can become more cost-efficient by lowering weight and volume, increasing energy efficiency, and by saving cost for development.
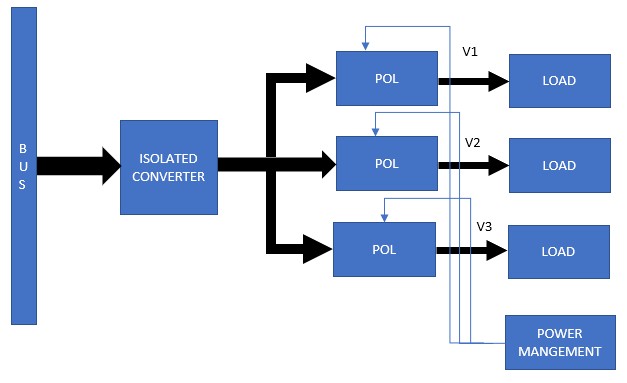
Modern distributed power architecture with intermediate bus converter (IBC) and point of load (POL) regulators consists of an isolated DC to DC bus converter stepping down a distributed bus voltage to an intermediate voltage which is used to power multiple POL converters.
First conversion stage (intermediate bus conversion)
The first conversion stage may be regulated or not regulated at all, depending on the regulation of the source and the acceptable input range of the POL regulator. A tightly regulated system source would favor the selection of a loosely regulated bus converter. While the choice to use a first-stage converter that is not regulated can greatly improve the efficiency of the converter, the associated variation of bus voltage will be much higher. An unregulated bus converter output will vary in direct proportion to the input voltage. Ranges of +/-20% or more are common and depend on bus specifications. A POL regulator able to accept a wide input voltage range offers flexibility in efficiency optimization to the user.
The choice of an intermediate voltage, 3.3V, 5V or 12V, depends on several factors: product availability, the distance of the bus converter from the point of use, and whether or not the intermediate voltage is required elsewhere in the system. The usage of the intermediate voltage by digital devices is one reason that a 5V or 3.3V bus is often tightly regulated. A 12V intermediate bus is often loosely regulated because it typically powers less sensitive analog loads.
GET IN TOUCH TODAY!
Do you have questions? Contact us!
POL converter
The first stage converter upstream from the POL converter often includes system isolation from the input to output grounds (common system requirement). The POL converter is almost never isolated to maximize efficiency and power density.
Proximity to low-voltage digital loads such as FPGAs, ASICs, and DSP processors is critical because these loads can induce large load transients with rapid load changes while requiring tight voltage regulation coupled with high DC currents. So, a common requirement in many applications is for the final down-conversion to occur as close to the load as possible. Proximity reduces the parasitic inductances and associated line voltage excursions that can result from load transitions.
Low Dropout Regulators (LDO) are often the chosen devices when the load requirements are under 2 Amps or when an easy to implement solution is desired. High sensitivity RF amplifier applications also dictate the use of LDOs over a switching regulator due to output noise performance capabilities. A switching regulator is a great fit when stepping down to a low voltage or when the current requirement exceeds 2 Amps, needing a more efficient solution. As the power requirements and regulation tolerances are challenging, designers to look beyond what is available today. A POL converter is a step-down DC-DC converter positioned close to the load, offering a precise voltage supply while meeting low-voltage and large-current requirements. In addition, the power supply impedance is reduced, which in turn minimizes the interference between different voltages and unwanted electromagnetic radiation.
It is important to note when considering system level performance that the POL converter efficiency should not be considered by itself. Different POL converters require different levels of intermediate bus regulation and the more stringent the POL converter input requirement the less efficient the intermediate stage will typically perform. Stage conversion losses and interconnect losses between stages need to be included when calculating overall system efficiency.
Currently, it is possible to choose centralized or distributed control of POL regulators. In the centralized control architecture, the point of load regulator has a digital interface and some programmability but no non-volatile memory. The control of the point of load regulator takes place through its digital interface from a central control IC (microcontroller). The programming of the point of load regulator in the system sets up initial conditions and default settings in the event of an interruption of the control signal. The other option is that the POL regulator is self-contained and runs its own control algorithm periodically reporting to a centralized watchdog or monitor IC. Each approach has its advantages; however, customers generally want the centralized control architecture for mass production and the distributed control architecture for system development.
Find the right microcircuits to develop a Power Unit for Space Applications.






Since 2000 in Alter Technology, as EEE Parts Engineer, first in the Engineering and Materials Management Department, has given technical support to customers in many different space programmes. And later on, as Coordinator of the Parts Engineering and Purchasing Department, has been in charge of guarantee the proper EEE Parts selection/definition/testing to ensure the technical/schedule/budget compliance to projects requirements. Currently and since 2017 is leading the Technical Content Maintenance Team of doEEEt platform.
With the continuous maintenance of the platform technical content, doEEEt provides to the space community the most updated and complete information about Hi-Rel EEE components, related documentation, and reports, as well as any associated procurement and testing activities.
- Hi-Rel Intermediate bus converter and point of load - December 11, 2021
- ASIC or FPGA, how to choose between them - October 25, 2021
- Ceramic Hermetic DDR2 SDRAM Memory avalaible for Space - September 13, 2021
0 comments on Hi-Rel Intermediate bus converter and point of load