
Overload Protection in Satellite Power Systems
- Posted by Emilio Cano García
- On June 15, 2020
- 0
Power Distribution Unit (PDU)
The Power Distribution Unit (PDU) in a satellite, aims to distribute energy across all subsystems and payloads and prevent the overload of the main power bus. The design of a PDU seeks efficient functionality, achieving a balance of performance, weight and reliability, meeting the mission requirements at the lowest possible cost without risk. The complexity and power consumption of the PDU has increased in recent decades due to a new design demand, such as:
- New digital devices require lower supply voltages and higher operating currents such as FPGA and ASIC devices.
- An increasing number of supply rails with tight power supply tolerances
- Reliable protection systems according to the needs of new devices
- Systems to improve energy efficiencies, such as sophisticated battery management and advanced power control
- Control the primary and redundant unit of the PDU.

To prevent overloads and load short circuits failures, a PDU needs many supervisory current monitoring circuits to ensure a controlled and reliable load connection and disconnection from the main satellite bus in a failure case. For this proposal Latching Current Limiters (LCLs) circuits as an effective way.
The use of LCLs in the power system of ESA (European Space Agency) satellites have been consolidated in the last decades, this has allowed for a global European agreement on the definition of the relevant interface, which is reflected in the ECSS-E-ST-20-20C standard and the ECSS-E-HB-20-20A handbook.
The LCL is a
“switchable and latching protection placed between a power source and the relevant load, causing a trip-off after having achieved at its output an overcurrent limitation for a definite trip-off time”.
The general architecture of LCL and essential elements are shown below:
- Under-Voltage Protection section
- Trip-OFF timer section
- The switch, the driver and the current sensor section
- Memory cell and switch supply section
- The auxiliary supply section
- The telemetry section
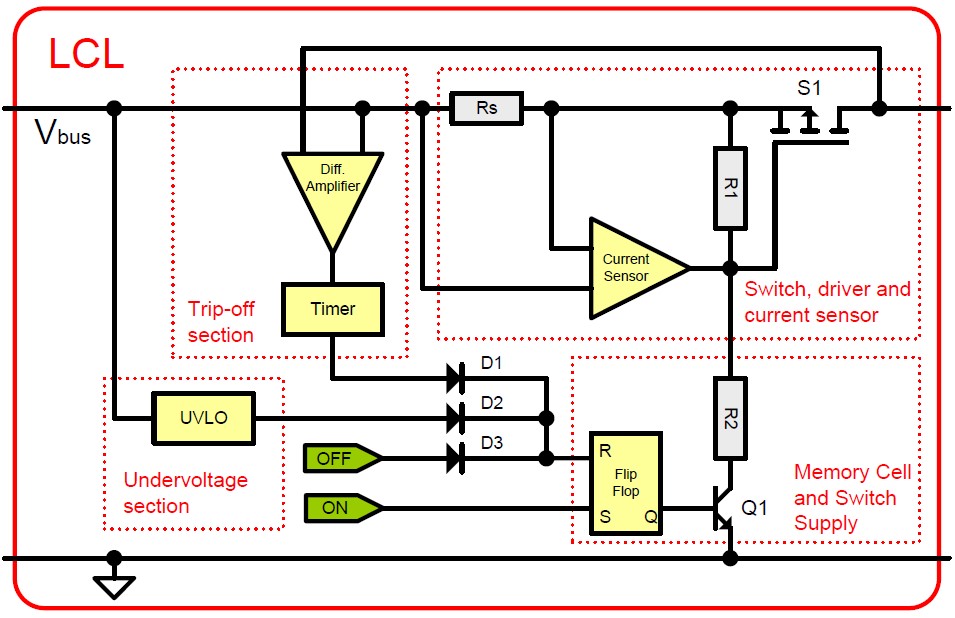
In the event of an overload, the current sensor detects if the measured value exceeds the set thresholds, causing the LCL to limit the current and activate a timer. If the overload lasts longer than a specified time (called trip-off time), the timer orders the LCL to shut down.
The LCL can be controlled ON and OFF states and with memory cell latch its last status. Generally, for the failure cases, there be an external command activation to reset the LCL into its original ON state.
Proper operation of an LCL implies (in addition to its components operating within SOA) having a correct overload limit threshold and trip-off time setting. This configuration depends on the needs of the payloads or subsystem requirements.
The current limit value of the current sensor is set by choosing properly de sense resistor value, taking into account the power dissipated in the resistance and the accuracy of the current measurement.
The voltage drop across the sensor resistor (VRSENSE) is continuously compared with the input offset (VOFFSET) of the measurement circuit, to activate the current limiter when 
In a PDU satellite system, each payload and subsystem have a dedicated LCL circuit which connects them to the main power bus. Every LCL have an individual configuration (current limit, Undervoltage protection level, trip-off time…) referred by the requirements of the payload or the subsystem. The control function of the PDU controls the LCLs with individual ON and OFF command interfaces, furthermore, collects and processes their telemetry by reading the telemetry interfaces of the LCLs.
There are different configurations and alternatives regarding LCLs connections in the PDU, depending on the complexity of the unit power system, which is explained in ECSS-E-HB-20-20A.
Find the right microcircuits to develop a Power Unit for Space Applications.






References:
- ECSS-E-ST-20-20C
- ECSS-E-HB-20-20A
- Accurate current sensing in spacecraft
- Power Distribution Unit -ESA-
With the continuous maintenance of the platform technical content, doEEEt provides to the space community the most updated and complete information about Hi-Rel EEE components, related documentation, and reports, as well as any associated procurement and testing activities.
- ESCC QUALIFIED PART LIST (QPL) Issue 239 (June 2023) Updates - August 31, 2023
- Issue 46 of EUROPEAN PREFERRED PARTS LIST (EPPL) | New Issue - June 13, 2023
- Issue 238 (May 2023) of ESCC QUALIFIED PART LIST (QPL) - June 13, 2023
0 comments on Overload Protection in Satellite Power Systems